1부에서 우리는 GPS 기둥 까지 부착하였다.

- 픽스호크 와 조종기 수신기 연결

다시 연결도를 보자.
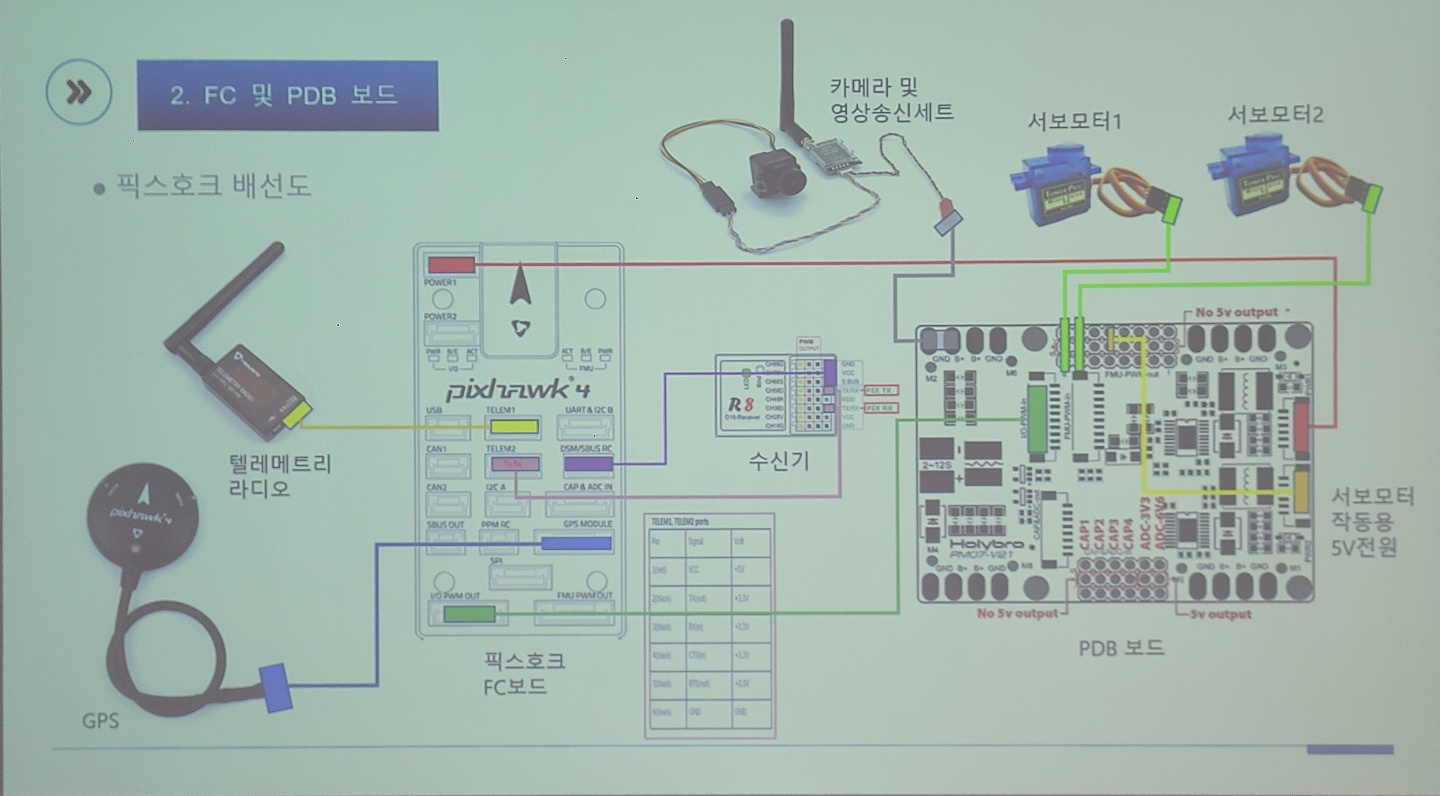
여기서 수신기 연결도를 보자.

R8 수신기 GND - VCC - S BUS의 3개의 핀이 픽스호크 DSM/SBUS RC에 연결된다.(보라색 선)

다시 수신기 연결도를 보자.
우리는 이번에는 수신기의 TX, RX 2개의 핀을 픽스호크의 TELEM2에 연결할 것이다.
TELEM2에서 TX, RX 핀이 어디에 있는지 알아야 한다. 이를 위해 아래 url의 픽스호크4 유저 가이드를 살펴보자.
https://docs.px4.io/master/en/flight_controller/pixhawk4.html
Pixhawk 4 | PX4 User Guide
Pixhawk 4 Pixhawk 4® is an advanced autopilot designed and made in collaboration with Holybro® and the PX4 team. It is optimized to run PX4 v1.7 and later, and is suitable for academic and commercial developers. It is based on the Pixhawk-project (opens
docs.px4.io
유저 가이드에서 핀아웃의 초록색 here을 클릭하면 픽스호크 pinout에 관한 데이터 시트를 제공한다.

데이터 시트에서 제공하는 TELEM 포트의 핀배치는 아래와 같다.

우리는 TX와 RX 핀만 쓰기 때문에 2번, 3번핀만 살리면 된다.
기존의 케이블을 꺼내 보자. 빨간색 선(1번) 기준으로 2번, 3번 키를 꺼내준다.

칼이나 니퍼로 이빨을 들면 선이 빼진다. 2, 3번만 남긴다.

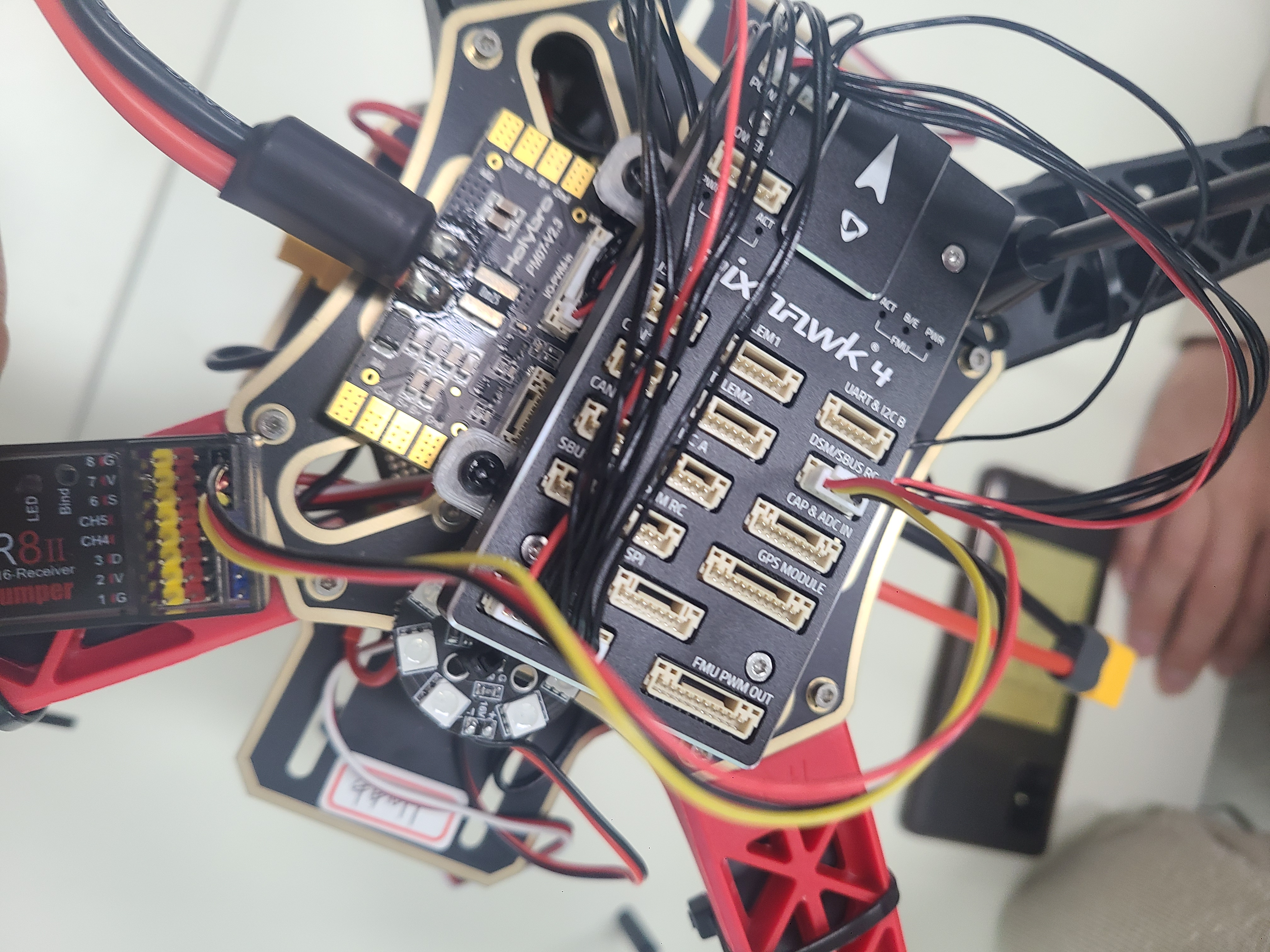
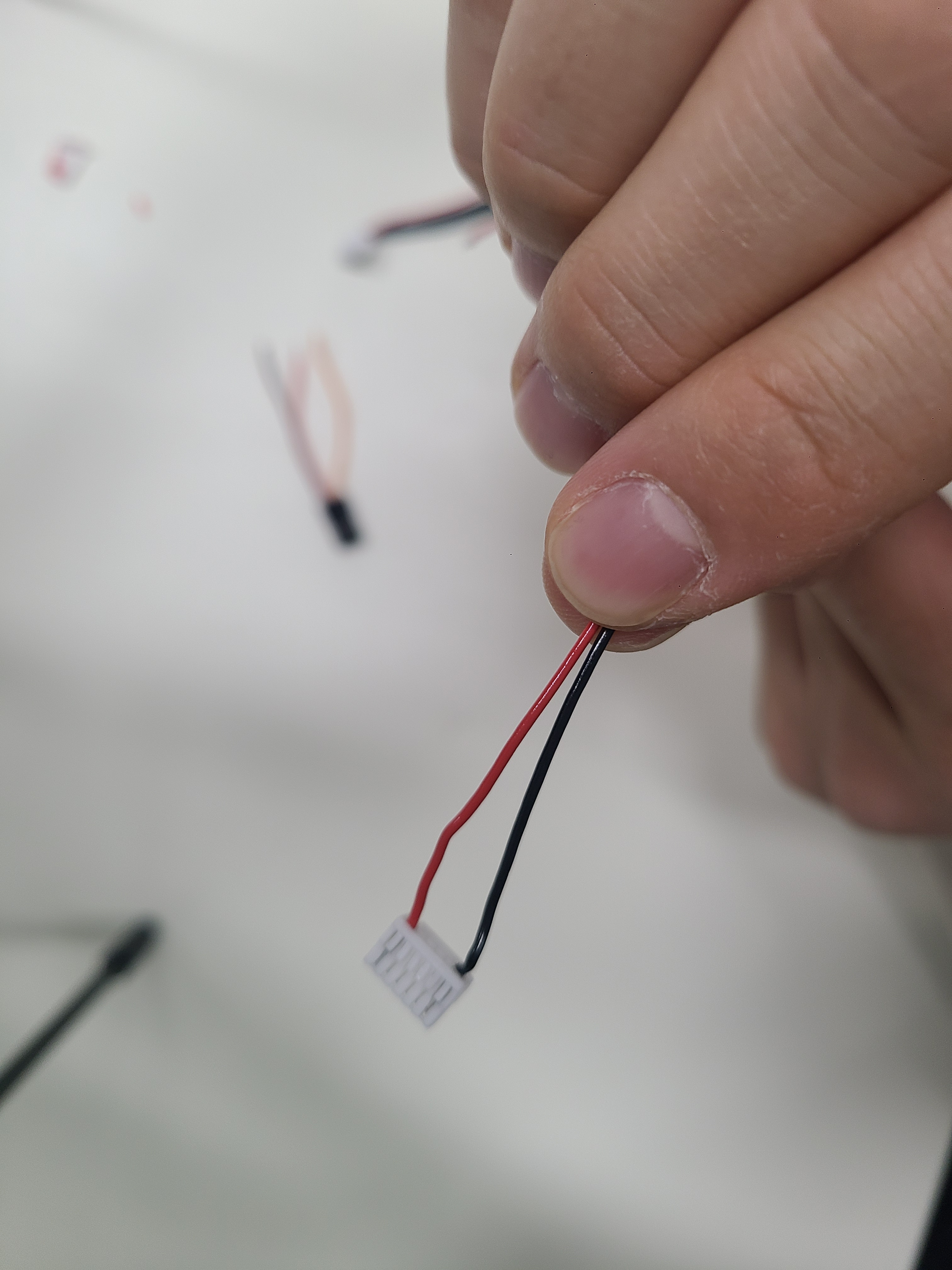
여기서 잠깐, 우리가 가지고 있는 R8 수신기를 보자.

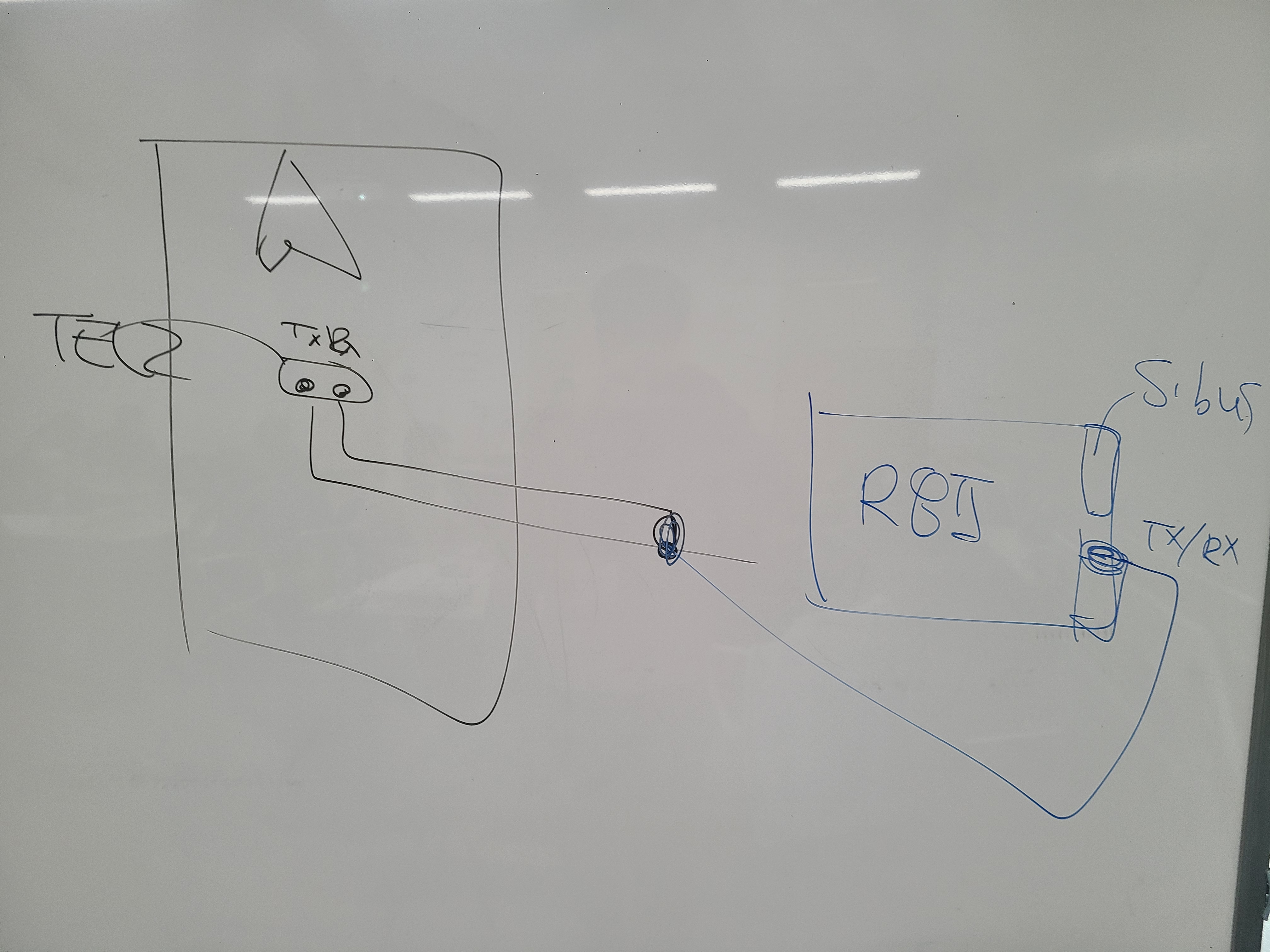
tx/rx 선이 하나로 묶여 있음을 볼수 있다. 따라서 픽스호크의 telem2의 rx, tx의 2개의 선이 r8 수신기에서는 하나의 선으로 묶여야 한다.
대략의 그림으로 나타내면 다음과 같다.
납떔을 하자.
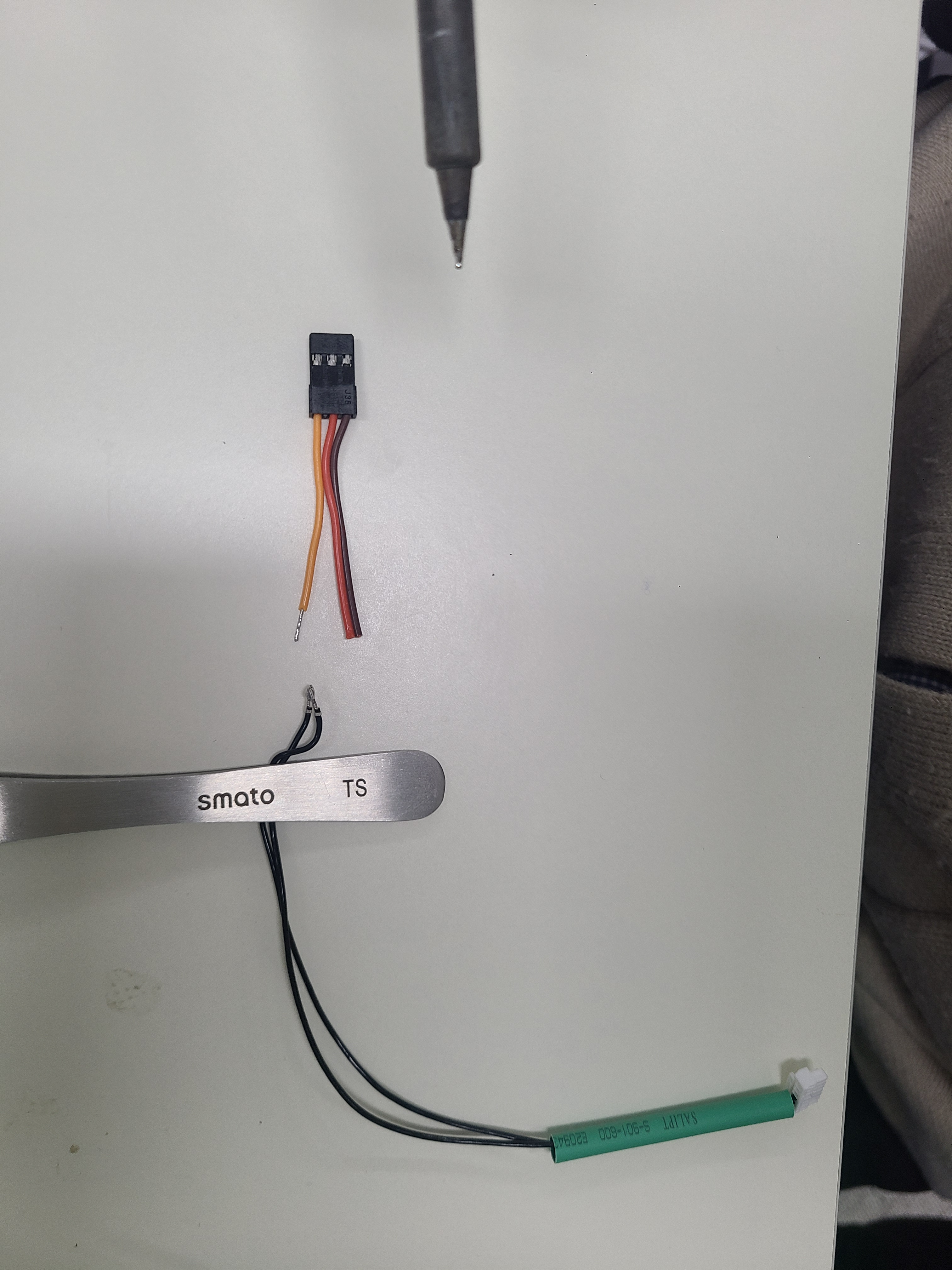

완성된 형태는 다음과 같다.

이제 수신기와 픽스호크에 연결을 해주자.


연결 완료 !

수신기를 케이블 타이로 고정하자.

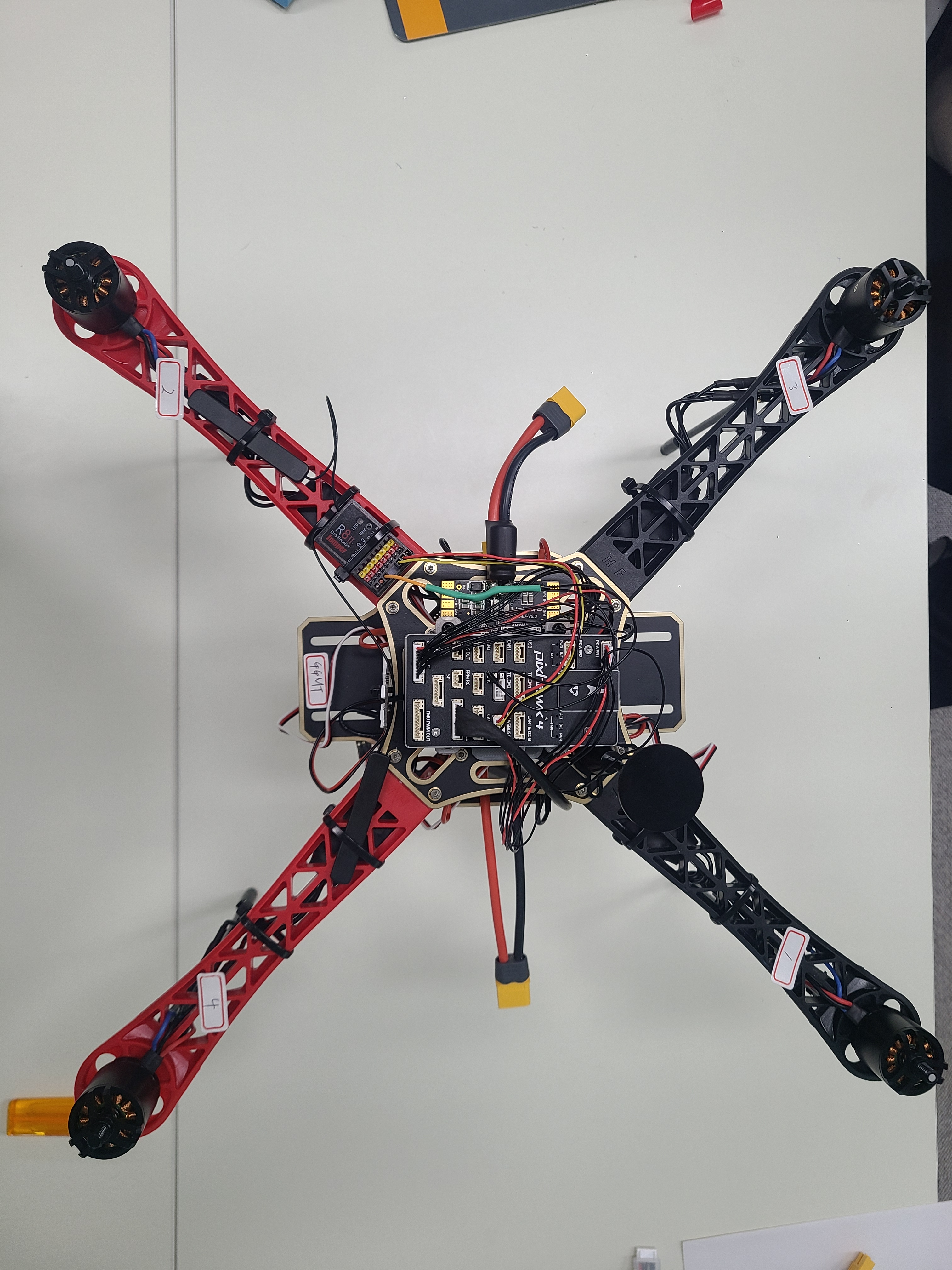
- 4개의 esc와 PBD보드 연결
아래와 같이 연결하려고 한다. 모터 번호는 아래 그림과 같다.

모터 순서는 아래와 같이 FC 제조사 마다 다르다. 우리는 픽스호크 순서를 따른다.

헷갈리지 않게 견출지로 붙여준다. 드론 앞뒤를 잘 구별하여 번호를 잘 기재하자.
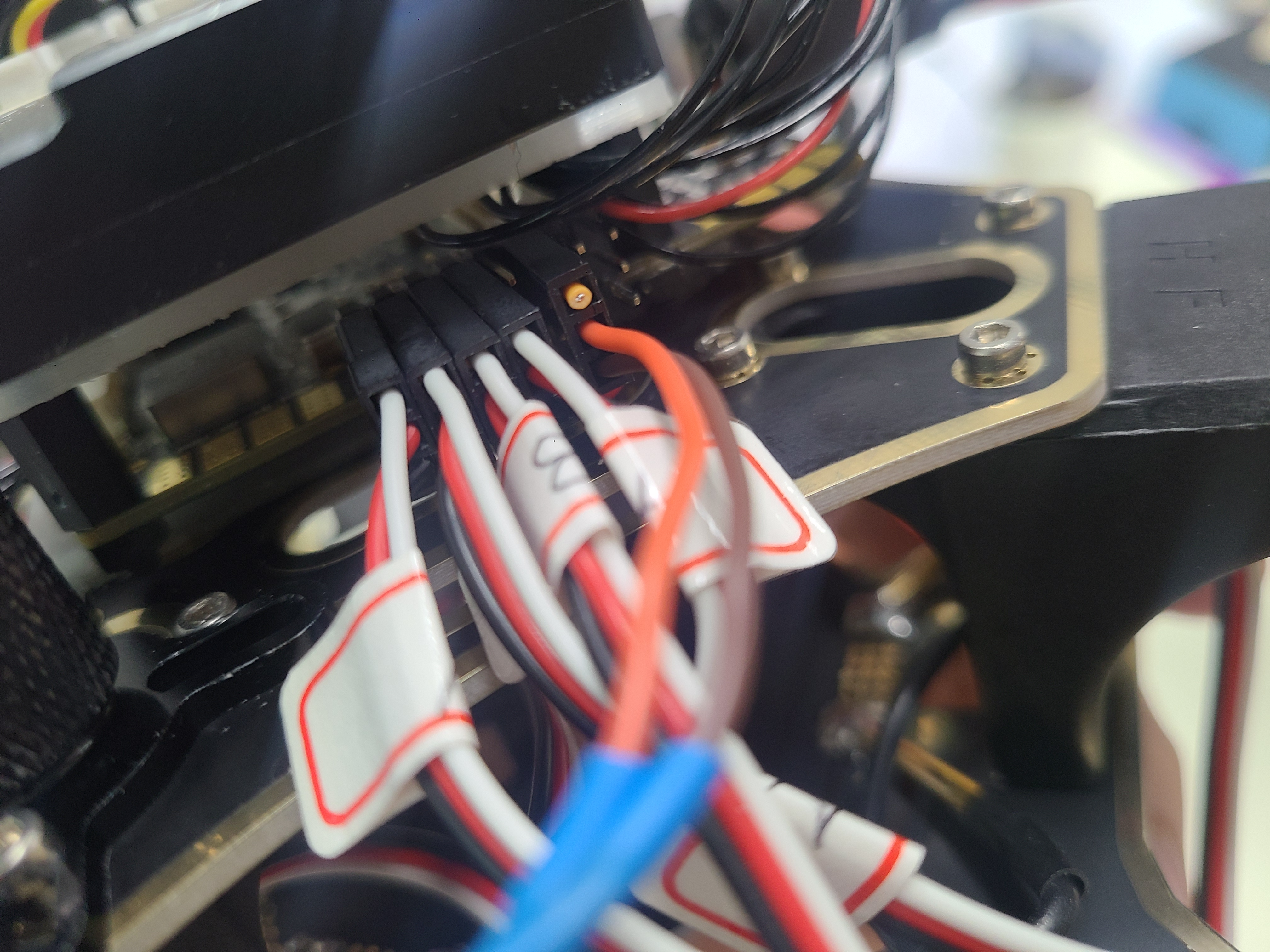
이제 각각의 esc 핀을 pbd 보드 측면의 핀들에 연결해야한다.

pwm out 핀은 1번 부터 8번까지 제공된다. 어디가 1번이고 8번인지 잘 확인하자.

1번 핀부터 연결한다. 선에도 헷갈리지 않게 견출지를 붙여 준다.

나머지 4개의 esc를 모두 연결해 주자.

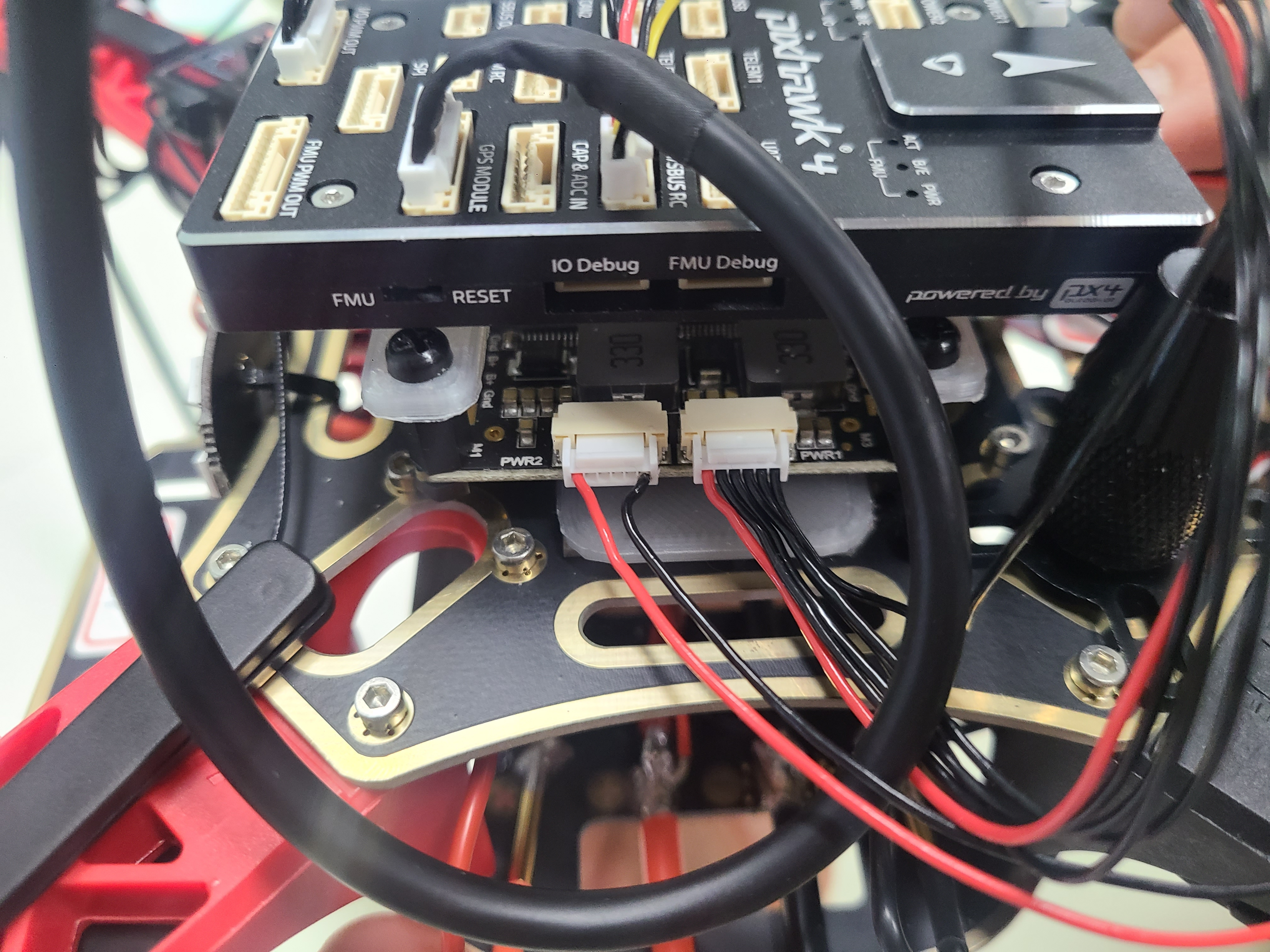
이번에는 pwr2(파워2, 노랑색)과 pwmout의 6번을 연결하여 esc에 전원을 주려고 한다.

pwr2의 핀배치를 보면 1번과 6번이 우리가 필요한 vcc, gnd임을 알수 있다.

pwr2의 1번과 6번만 따서, PBD 보드의 6번 +, - 단자에 연결할 것이다.
아까와 같이 선따보자.
pwmout쪽 단자도 연결하자.

pbd보드의 pwr2단자 위치 확인한 후

아래 위치에 거침없이 꼽는다.
마찬가지로 pbd보드의 pwmout 6번에도 연결한다.(꼭 6번일 필요는 없다.)
완료.
- 배터리 팩 연결

배터리 팩은 사진 보고 직관적으로 하면 된다.

여기서 중요한점은 배터리 셀이 3셀인지, 4셀인지 확인하고 esc 허용 스펙과 호완이 맞는지 꼭 확인하자.
- 프로펠러 방향

프로펠러 방향은 하향풍이 나올수 있도록 11자로 했을때 쓰다듬는 방향이 안쪽으로 향하게 하면 된다.
안전을 위해 프로펠러는 모터테스트 완료 전까지 부착을 하지 않는다.
자율비행 드론 제작 하드웨어 제작 2부 끝.
미션플래너 세팅으로 이어집니다....
'메이커 프로젝트' 카테고리의 다른 글
| 음성으로 로봇 팔 제어하기 (17) | 2022.07.16 |
|---|---|
| 픽스호크 자율비행 드론 제작 - 미션플래너 세팅 2부(조종기 세팅, esc 캘리브레이션, 모터테스트) (11) | 2022.01.20 |
| 자율비행 드론 미션플래너 세팅 1부 (0) | 2022.01.18 |
| F450 자율비행 드론 하드웨어 제작 1부 (0) | 2022.01.18 |
| 드론 조립2 (0) | 2021.09.28 |



